Additive Manufacturing Drone Chassis
Virginia Tech DREAMS lab hosted and additive manufacturing competition in 2015. The goal was to design and build a remote controlled vehicle, capable of ground and air operation made entirely via 3-D printing (except electronics and motors).
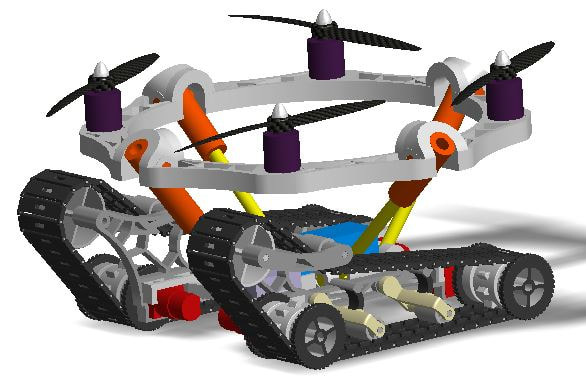
Our team Equator, was composed of myself, YenChe Huang (tracks and integration), Matthew Deane (RC control) and Jaydeep Deshpande (structural analysis). Our submission was quadrotor configuration with two tracks (christie suspension), which was printed with material jetting (Tangoblack for threads and spring and Verowhite for the frame).
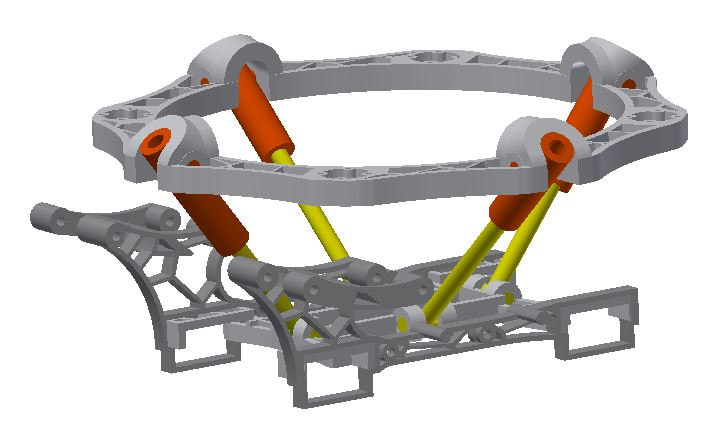
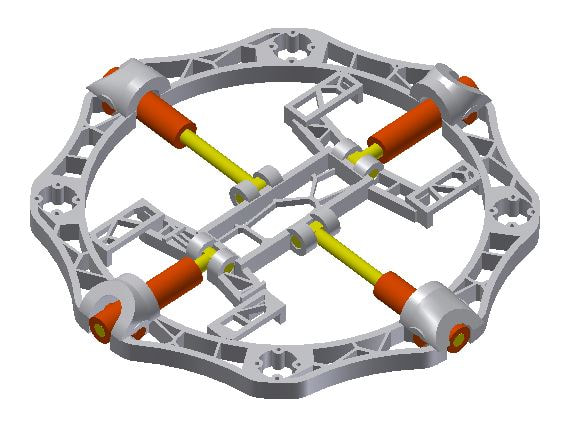
I designed the chassis and assembled the electronics. The chassis was inspired by the concept of developable surfaces. The idea was to reduce printing and assembly time by printing the frame flat and then extend it into a 3D structure.
Our team Equator, was composed of myself, YenChe Huang (tracks and integration), Matthew Deane (RC control) and Jaydeep Deshpande (structural analysis). Our submission was quadrotor configuration with two tracks (christie suspension), which was printed with material jetting (Tangoblack for threads and spring and Verowhite for the frame).
I designed the chassis and assembled the electronics. The chassis was inspired by the concept of developable surfaces. The idea was to reduce printing and assembly time by printing the frame flat and then extend it into a 3D structure.
|
|
Our track design was very good and easily outperformed other competitors. But it was too heavy and the lack of proper calibration of the rotors made flying very unstable. In the end, the material we chose was too brittle to support the rough landings we had.